 국립중앙도서관 "우편 복사 서비스"로 연결 됩니다.
국립중앙도서관 "우편 복사 서비스"로 연결 됩니다.

 KCI
KCIA factorization-based 3D reconstruction system is realized to recover 3D scene from an image sequence. The image sequence is captured from uncalibrated perspective camera from several views. Many matched feature points over all images are obtained by ...
다국어 입력
あ
ぁ
か
が
さ
ざ
た
だ
な
は
ば
ぱ
ま
や
ゃ
ら
わ
ゎ
ん
い
ぃ
き
ぎ
し
じ
ち
ぢ
に
ひ
び
ぴ
み
り
う
ぅ
く
ぐ
す
ず
つ
づ
っ
ぬ
ふ
ぶ
ぷ
む
ゆ
ゅ
る
え
ぇ
け
げ
せ
ぜ
て
で
ね
へ
べ
ぺ
め
れ
お
ぉ
こ
ご
そ
ぞ
と
ど
の
ほ
ぼ
ぽ
も
よ
ょ
ろ
を
ア
ァ
カ
サ
ザ
タ
ダ
ナ
ハ
バ
パ
マ
ヤ
ャ
ラ
ワ
ヮ
ン
イ
ィ
キ
ギ
シ
ジ
チ
ヂ
ニ
ヒ
ビ
ピ
ミ
リ
ウ
ゥ
ク
グ
ス
ズ
ツ
ヅ
ッ
ヌ
フ
ブ
プ
ム
ユ
ュ
ル
エ
ェ
ケ
ゲ
セ
ゼ
テ
デ
ヘ
ベ
ペ
メ
レ
オ
ォ
コ
ゴ
ソ
ゾ
ト
ド
ノ
ホ
ボ
ポ
モ
ヨ
ョ
ロ
ヲ
―
http://chineseinput.net/에서 pinyin(병음)방식으로 중국어를 변환할 수 있습니다.
변환된 중국어를 복사하여 사용하시면 됩니다.
예시)
- 中文 을 입력하시려면 zhongwen을 입력하시고 space를누르시면됩니다.
- 北京 을 입력하시려면 beijing을 입력하시고 space를 누르시면 됩니다.
А
Б
В
Г
Д
Е
Ё
Ж
З
И
Й
К
Л
М
Н
О
П
Р
С
Т
У
Ф
Х
Ц
Ч
Ш
Щ
Ъ
Ы
Ь
Э
Ю
Я
а
б
в
г
д
е
ё
ж
з
и
й
к
л
м
н
о
п
р
с
т
у
ф
х
ц
ч
ш
щ
ъ
ы
ь
э
ю
я
′
″
℃
Å
¢
£
¥
¤
℉
‰
$
%
F
₩
㎕
㎖
㎗
ℓ
㎘
㏄
㎣
㎤
㎥
㎦
㎙
㎚
㎛
㎜
㎝
㎞
㎟
㎠
㎡
㎢
㏊
㎍
㎎
㎏
㏏
㎈
㎉
㏈
㎧
㎨
㎰
㎱
㎲
㎳
㎴
㎵
㎶
㎷
㎸
㎹
㎀
㎁
㎂
㎃
㎄
㎺
㎻
㎽
㎾
㎿
㎐
㎑
㎒
㎓
㎔
Ω
㏀
㏁
㎊
㎋
㎌
㏖
㏅
㎭
㎮
㎯
㏛
㎩
㎪
㎫
㎬
㏝
㏐
㏓
㏃
㏉
㏜
㏆

RISS 인기검색어
부가정보
다국어 초록 (Multilingual Abstract)
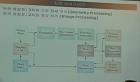
A factorization-based 3D reconstruction system is realized to recover 3D scene from an image sequence. The image sequence is captured from uncalibrated perspective camera from several views. Many matched feature points over all images are obtained by feature tracking method. Then, these data are supplied to the 3D reconstruction module to obtain the projective reconstruction. Projective reconstruction is converted to Euclidean reconstruction by enforcing several metric constraints. After many triangular meshes are obtained, realistic reconstruction of 3D models are finished by texture mapping. The developed system is implemented in C++, and Qt library is used to implement the system user interface. OpenGL graphics library is used to realize the texture mapping routine and the model visualization program. Experimental results using synthetic and real image data are included to demonstrate the effectiveness of the developed system.
국문 초록 (Abstract)
본 연구에서는 여러 이미지를 이용하여 사실적인 3차원 장면의 모델을 얻는 방법이 구현되었다. 이미지는 파라메터를 모르는 카메라를 이용하여 여러 위치에서 획득한 것을 사용하였다. 먼...
본 연구에서는 여러 이미지를 이용하여 사실적인 3차원 장면의 모델을 얻는 방법이 구현되었다. 이미지는 파라메터를 모르는 카메라를 이용하여 여러 위치에서 획득한 것을 사용하였다. 먼저 특징점 추출 및 추적 방법을 사용하여 모든 이미지에 대한 대응점들을 구하고 이 점들을 사용하여 사영복원을 구한다. 그 다음 사영 복원된 값에 여러 제약조건을 사용하여 유클리디언 복원을 하면 특징점들의 3차원 좌표값이 계산된다. 이 좌표값을 이용하여 삼각형 메쉬를 구한 후 이 면에 텍스처 맵핑을 하면 사실적인 복원이 완성된다. 전체 시스템은 C++언어로 구현하였으며, 사용자 인터페이스는 Qt 라이브러리로, 텍스처 맵핑과 모델 가시화 부분은 OpenGL 그래픽스 라이브러리로 구현하였다. 구현된 시스템의 효용성을 보이기 위해 모의 데이터와 실제 이미지 데이터를 이용하여 실험한 결과를 포함하였으며 만족할 만한 복원 결과를 얻을 수 있었다.
참고문헌 (Reference)
1 김성용, "제약 조건을 이용한 셀프 캘리브레이션 방법" 28 (28): 358-368, 2001
2 "Qt Library"
3 M. Woo, "OpenGL Programming Guide" Addison Wesley 1999
4 W. H. Press, "Numerical Recipes" Cambridge University Press 1989
5 R. Hartley, "Multiple View Geometry in Computer Vision" Cambridge University Press 2000
6 Q. Chen, "Multi-view Image-Based Rendering and Modeling" USC 2000
7 "MOVI house data"
8 Jianbo Shi, "Good Features to Track" 593-600, 1994
9 Q. Chen, "Efficient iterative solution to M-view projective reconstruction problem"
10 D. Lowe, "Distinctive image features from scale-invariant key-points" 60 (60): 91-110, 2004
1 김성용, "제약 조건을 이용한 셀프 캘리브레이션 방법" 28 (28): 358-368, 2001
2 "Qt Library"
3 M. Woo, "OpenGL Programming Guide" Addison Wesley 1999
4 W. H. Press, "Numerical Recipes" Cambridge University Press 1989
5 R. Hartley, "Multiple View Geometry in Computer Vision" Cambridge University Press 2000
6 Q. Chen, "Multi-view Image-Based Rendering and Modeling" USC 2000
7 "MOVI house data"
8 Jianbo Shi, "Good Features to Track" 593-600, 1994
9 Q. Chen, "Efficient iterative solution to M-view projective reconstruction problem"
10 D. Lowe, "Distinctive image features from scale-invariant key-points" 60 (60): 91-110, 2004
11 M. Han, "Creating 3D Models with Uncalibrated Cameras" 2000
12 Bruce D. Lucas, "An Iterative Image Registration Technique with an Application to Stereo Vision" 674-679, 1981
13 KLT, "An Implementation of the Kanade-Lucas-Tomasi Feature Tracker"
동일학술지(권/호) 다른 논문
-
P2P (Peer-to-Peer) 비디오 스트리밍을 위한 다중 비디오 품질 인센티브 기법
- 한국정보처리학회
- 권진백
- 2010
- KCI등재
-
- 한국정보처리학회
- 정성태
- 2010
- KCI등재
-
색상분할 및 객체 특징정보의 계층적 적용에 의한 신호등 및 속도 표지판 인식
- 한국정보처리학회
- 이규원
- 2010
- KCI등재
-
- 한국정보처리학회
- 이성욱
- 2010
- KCI등재
분석정보
인용정보 인용지수 설명보기
학술지 이력
| 연월일 | 이력구분 | 이력상세 | 등재구분 |
|---|---|---|---|
| 2027 | 평가예정 | 재인증평가 신청대상 (재인증) | |
| 2021-01-01 | 평가 | 등재학술지 유지 (재인증) |  |
| 2018-01-01 | 평가 | 등재학술지 유지 (등재유지) | |
| 2015-01-01 | 평가 | 등재학술지 유지 (계속평가) | |
| 2012-10-31 | 학술지명변경 | 한글명 : 소프트웨어 및 데이터 공학 -> 정보처리학회논문지. 소프트웨어 및 데이터 공학 | |
| 2012-10-10 | 학술지명변경 | 한글명 : 정보처리학회논문지B -> 소프트웨어 및 데이터 공학외국어명 : The KIPS Transactions : Part B -> KIPS Transactions on Software and Data Engineering | |
| 2010-01-01 | 평가 | 등재학술지 유지 (등재유지) | |
| 2008-01-01 | 평가 | 등재학술지 유지 (등재유지) | |
| 2006-01-01 | 평가 | 등재학술지 유지 (등재유지) | |
| 2003-01-01 | 평가 | 등재학술지 선정 (등재후보2차) | |
| 2002-01-01 | 평가 | 등재후보 1차 PASS (등재후보1차) |  |
| 2000-07-01 | 평가 | 등재후보학술지 선정 (신규평가) | |
학술지 인용정보
| 기준연도 | WOS-KCI 통합IF(2년) | KCIF(2년) | KCIF(3년) |
|---|---|---|---|
| 2016 | 0.35 | 0.35 | 0.28 |
| KCIF(4년) | KCIF(5년) | 중심성지수(3년) | 즉시성지수 |
| 0.23 | 0.19 | 0.511 | 0.06 |
연관 공개강의(KOCW)
이 자료와 함께 이용한 RISS 자료
나만을 위한 추천자료


